
济南恒信新(xīn)能(néng)源汽車(chē)教學(xué)设备
一站式采購(gòu)加工 运营17年 质量保证

全國(guó)客服热線(xiàn):
0531-88914116
13455126350
0531-88914116
13455126350
价格:2.1-10万
功能(néng):V2X微缩沙盘展示
产品型号:hx-v2xwsspjzdjsxc-366*962
厂家定制:加工定制
起订量:1台起
作者:汽車(chē)教學(xué)设备 来源:无人驾驶汽車(chē)教學(xué)设备
发布时间:2022-01-18 11:47:59 阅读次数:771
電(diàn)话:13455126350
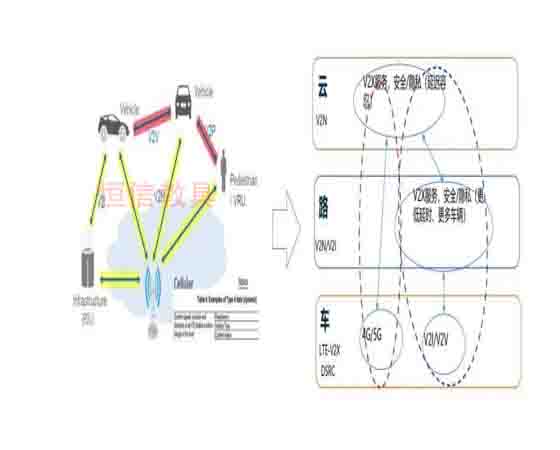
V2X微缩沙盘及自动驾驶小(xiǎo)車(chē)实验台融合激光雷达、IMU、轮速计等传感器,构建栅格地图,基于视觉slam构建三维点云地图,将激光slam栅格地图与视觉slam点云地图融合,实现厘米级定位与导航,下面由小(xiǎo)编為(wèi)您详细介绍!
1.阿克曼前轮转向机构;
2.轮速计;
3.陀螺仪;
4.算法板 Jetson Nano;
5.智能(néng)锂電(diàn)池 5600mah;
6.深度相机intel realsenseD435;
7.激光雷达默EAI X4,可(kě)适配思岚A1,A2,A3,S1等多(duō)数激光雷达;
8.GPS+北斗模块:(考虑室内GNSS信号弱,可(kě)由多(duō)相机动态捕捉定位系统或超宽带定位系统代替,可(kě)根据具體(tǐ)环境选换。);
9.配无線(xiàn)遥控器;
10.负载5kg;
11.長(cháng)宽高:460*210*220mm;
12.速度1.2米/秒(miǎo);
1.模拟GNSS定位功能(néng)
针对室内GPS/北斗信号弱的情况。
方案一:基于室内动态捕捉技术,通过多(duō)个位于不同方位的摄像头,实现对整个智慧交通仿真沙盘區(qū)域的各要素定位信息的覆盖,移动定位精度低于1cm,实现对移动中的車(chē)辆高精度定位。从原理(lǐ)及数据层面,模拟GPS全球定位系统定位机制及数据制式,智能(néng)小(xiǎo)車(chē)通过車(chē)载定位系统,接收来自3个以上卫星(摄像机)的距离信息以及摄像头方位信息,进行联合定位及航向确定,并通过终端系统将位置信息及航向信息发送给小(xiǎo)車(chē),实现車(chē)-服務(wù)器的通讯,指引小(xiǎo)車(chē)行驶。
方案二:部署超宽带定位基站,由超宽带定位代替GNSS实现小(xiǎo)車(chē)在沙盘區(qū)域中的定位,并将超宽带定位数据与激光slam地图匹配定位数据融合,实现精度不低于1cm的定位与导航。
2.GNSS系统+IMU+轮速计数据融合
V2X微缩沙盘及自动驾驶小(xiǎo)車(chē)是多(duō)传感器组合定位,基于扩展卡尔曼滤波算法实现融合导航,根据环境变化自主切换各传感器优先级权重,增强导航与定位系统鲁棒性。
3.自主路径规划与导航
根据设定起止位置,小(xiǎo)車(chē)自主进行全局路径规划,基于快速随机搜索树等算法实现小(xiǎo)車(chē)自主避障等局部路径规划。
4.灵活动态避障,可(kě)倒車(chē)避障
小(xiǎo)車(chē)行驶过程中基于局部路径规划算法根据路况自主路径规划,自主识别障碍物(wù)特征,并根据障碍物(wù)特征实现自主调速、绕弯、倒車(chē)等机动动作。运动控制误差不大于3cm。
5.红绿灯、常见交通标识视觉识别
基于卷积神经网络对红绿灯、常见交通标识进行实时视觉识别,处理(lǐ)器同步控制小(xiǎo)車(chē)做出停車(chē)等相应动作。
6.電(diàn)池電(diàn)压实时监控,低压报警,自主充電(diàn)
实时监测小(xiǎo)車(chē)電(diàn)池状态,当监测到電(diàn)池電(diàn)压过低时,小(xiǎo)車(chē)自主寻找无線(xiàn)充電(diàn)桩,自主充電(diàn)。
7.绿波巡航演示
云控系统根据小(xiǎo)車(chē)行車(chē)状态信息上传和路侧端路况信息感知,控制交通信号灯合理(lǐ)配时,实现多(duō)辆沙盘小(xiǎo)車(chē)的绿波巡航功能(néng)演示。
8.路侧摄像头视频监控与車(chē)载实时行車(chē)记录仪图像传输模块
路侧端部署摄像头视频监控系统,实时向后台显示系统传输路况影像信息,同时各小(xiǎo)車(chē)向后台云系统实时传输前向行驶环境影像及单車(chē)行車(chē)状态参数。
9.周边車(chē)辆间車(chē)車(chē)通信传感模块
通过Wi-Fi、Zigbee等无線(xiàn)通信手段进行車(chē)与車(chē)间的通信。車(chē)与車(chē)间实现信息交流与信息共享,包括車(chē)辆位置、行驶速度等車(chē)辆状态信息,可(kě)用(yòng)于判断邻車(chē)安全距离、道路車(chē)流状况等信息
10.車(chē)载近距预警及ADAS模块程序,自主换道、自主超車(chē)
車(chē)载红外線(xiàn)(雷达)传感器模块等距离探测传感器。实时感知邻車(chē)及路况距离信息,由ADAS模块分(fēn)析传感器信息并根据行車(chē)路况,每辆小(xiǎo)車(chē)根据自己的初始设定任務(wù),实现自主刹車(chē)、自主换道、自主加速超車(chē)等主动安全控制,超車(chē)后,自主并線(xiàn)到原来車(chē)道。
11.車(chē)载ETC模块
小(xiǎo)車(chē)内绑定IC卡的发射设备,IC卡為(wèi)小(xiǎo)車(chē)身份卡。小(xiǎo)車(chē)进入沙盘高速路时进行不停車(chē)快速自动收费,当車(chē)辆接近收费站台时,通过收费站台上的传感器设备获取車(chē)辆内的電(diàn)子标签并扣取其中的费用(yòng)。扣取完通行费用(yòng)后感应抬杆器自动将栏杆抬起。
以上内容就是介绍的V2X微缩沙盘及自动驾驶小(xiǎo)車(chē):;希望对订購(gòu)无人驾驶汽車(chē)教學(xué)设备的朋友们有(yǒu)所帮助,可(kě)能(néng)会出现介绍错误,看到请马上联系我们改正,想了解其中更多(duō)内容以及行情资讯,欢迎收藏本站,也可(kě)電(diàn)话联系我们索要设备的功能(néng)参数等,或者直接实地考察,也可(kě)電(diàn)话微信沟通订購(gòu)等!





添加微信
可(kě)微信咨询
全國(guó)免费服務(wù)热線(xiàn)
134-5512-6350